
PI(S):
Sponsor(s):
This thesis presents the design, implementation and control of a new class of self-bearing motors. The primary thesis contributions include the design and experimental demonstration of hysteresis self-bearing motors, novel segmented stator structures, MIMO loop shaping control algorithm for levitation and commutation, hysteresis motor analysis including frequency dependency, nonlinear hysteresis model including loop widening, and a novel single-axis self-bearing motor, as well as a zero power configuration for this type of motor.
Self-Bearing Motor Design and Control
In the late 1980s, the basic concepts of self-bearing motors were proposed. Since then, different types of AC and DC electric machines have been studied as a self-bearing motor. The self-bearing system is a key technology for high efficiency and compact systems with integrated magnetic levitation for high speed and high precision applications. One of the major disadvantages of existing self-bearing motors for high speed application is their rotor mechanical construction. Either the permanent magnet or induction machines rotor has mechanical features that introduces stress concentrations. Permanent magnets have very low mechanical strength and need to be inserted into the rotor. The assembly of magnets makes rotor vulnerable to mechanical failure at high speed. On the other hand, induction motors use soft steel to reduce hysteresis loss. Their rotors are slotted to either carry wires or in case of squirrel cages, having aluminum or copper bars.
As a promising alternative, this thesis demonstrates hysteresis self-bearing motors which have a simple construction with a solid and smooth rotor. This is a very important characteristic for some applications. This type of system can also be used as a magnetic bearing that can apply a finite amount of torque. The rotor doesn't have to be laminated and can be made from high strength steel. We designed, built and tested this type of self-bearing motor successfully.
In this thesis we also introduced a new type of segmented stator for hysteresis machines. The major advantages of this stator are: easy and low cost manufacturing, higher filling factor and higher motor efficiency. We tested the self-bearing concept successfully with this new configuration.
We have also introduced a novel single axis self-bearing motor that is very suitable for rotors with large length to diameter aspect ratio, such as high speed flywheels for energy storage. We implemented a zero power levitation condition along with passive damping for this system that has several advantages for high speed systems. One of the major advantages of zero power systems is the simple and robust touch down bearing design which is a key element for active magnetic bearings and self-bearing motors. This is mainly because the bearings experience minimal load in case of power failure.
Hysteresis is a time-rate dependent phenomena which is fundamentally related to eddy current formation in the material and the thermal agitation. Hysteresis loops of materials with large hysteresis are highly frequency dependent. Therefore we added hysteresis frequency dependency to hysteresis motor analysis, which is believed to be a novel contribution. We have also developed linear and nonlinear analyses for the stabilizing forces and moments for hysteresis self-bearing motor. The nonlinear analysis is based on Chua's nonlinear hysteresis model that includes loop widening. The theoretical results were verified by experimental data for three different type motor configurations with good accuracy.
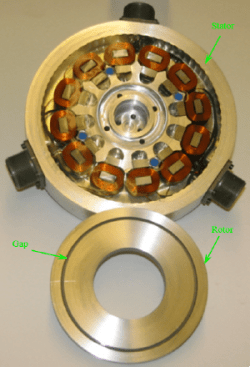
Figure: Segmented stator design